La topologie est la branche des mathématiques qui étudie les notions de proximité, de continuité et de déformation sans faire intervenir de mesure de distance fixe. Elle répond à une question fondamentale : qu’est-ce que cela signifie qu’un point soit « proche » d’un ensemble, ou qu’une fonction soit « continue », dans un cadre aussi général que possible ? Née des besoins de l’analyse au XIXe siècle, la topologie est aujourd’hui indispensable en analyse, en géométrie, en physique mathématique et même en informatique théorique. Comprendre la topologie, c’est acquérir le langage commun de presque toutes les mathématiques modernes.
Dans ce cours, nous construisons pas à pas les fondements de la topologie générale : espaces topologiques, ouverts et fermés, voisinages, adhérence et intérieur, continuité, puis les grandes propriétés globales que sont la compacité et la connexité. Chaque notion est accompagnée d’une motivation intuitive et d’exemples concrets.
Pourquoi la topologie ? Intuition et histoire
Imaginez que vous souhaitez définir ce que signifie « converger vers une limite » non plus sur la droite réelle \(\mathbb{R}\), mais sur un espace de fonctions continues, sur une surface courbe, ou sur un ensemble abstrait quelconque. La définition classique \(|x_n – \ell| \to 0\) repose sur la distance, mais une distance n’existe pas toujours de façon naturelle. La topologie résout ce problème en abstrayant la seule information pertinente : savoir quels ensembles sont « ouverts ».
Historiquement, c’est Henri Poincaré qui, à la fin du XIXe siècle, posa les premières bases de ce qui allait devenir la topologie algébrique, tandis que Felix Hausdorff axiomatisa les espaces topologiques en 1914. Depuis, la topologie s’est ramifiée en une multitude de sous-domaines : topologie différentielle, topologie algébrique, topologie des graphes, et bien d’autres.
Définition d’un espace topologique
Définition : Espace topologique
Soit \(X\) un ensemble non vide. Une topologie sur \(X\) est une famille \(\mathcal{T}\) de parties de \(X\), appelées les ouverts de \(X\), vérifiant les trois axiomes suivants :
- \(\emptyset \in \mathcal{T}\) et \(X \in \mathcal{T}\) (l’ensemble vide et \(X\) entier sont des ouverts).
- Toute réunion — même infinie — d’éléments de \(\mathcal{T}\) appartient à \(\mathcal{T}\) (la réunion quelconque d’ouverts est un ouvert).
- Toute intersection finie d’éléments de \(\mathcal{T}\) appartient à \(\mathcal{T}\) (l’intersection finie d’ouverts est un ouvert).
Le couple \((X, \mathcal{T})\) est alors appelé un espace topologique.
Les deux topologies extrêmes
Sur n’importe quel ensemble \(X\), deux topologies canoniques existent toujours :
- La topologie grossière (ou indiscrète) : \(\mathcal{T} = \{\emptyset, X\}\). C’est la plus pauvre — seuls \(\emptyset\) et \(X\) sont ouverts.
- La topologie discrète : \(\mathcal{T} = \mathcal{P}(X)\) (toutes les parties de \(X\) sont ouvertes). C’est la plus riche.
Entre ces deux extrêmes, il existe une infinité de topologies possibles sur un même ensemble. Dire qu’une topologie est plus fine qu’une autre signifie qu’elle possède davantage d’ouverts.
Exemple fondamental : la topologie usuelle sur ℝ
Sur \(\mathbb{R}\), on appelle topologie usuelle la topologie dont les ouverts sont exactement les réunions (quelconques) d’intervalles ouverts \(]a, b[\). C’est la topologie que vous avez implicitement utilisée depuis le lycée chaque fois que vous avez parlé de limite ou de continuité.
Ouverts, fermés et voisinages en topologie
Définition : Partie fermée
Une partie \(F \subseteq X\) est dite fermée si son complémentaire \(X \setminus F\) est ouvert.
Attention : une partie peut être à la fois ouverte et fermée (on dit ouvert-fermé ou clopen en anglais). C’est le cas de \(\emptyset\) et de \(X\) dans tout espace topologique. En topologie discrète, chaque partie est ouverte-fermée. La connexité (vue plus bas) caractérise précisément les espaces où seuls \(\emptyset\) et \(X\) sont ouverts-fermés.
Propriété : Stabilité des fermés
Dans un espace topologique \((X, \mathcal{T})\) :
- \(\emptyset\) et \(X\) sont fermés.
- Toute intersection quelconque de fermés est fermée.
- Toute réunion finie de fermés est fermée.
Voisinages d’un point
Soit \(x \in X\). Une partie \(V \subseteq X\) est un voisinage de \(x\) s’il existe un ouvert \(U \in \mathcal{T}\) tel que \(x \in U \subseteq V\). Autrement dit, un voisinage de \(x\) est une partie qui « entoure » \(x\) en contenant un ouvert autour de lui.
Dans \(\mathbb{R}\) muni de la topologie usuelle, un voisinage de \(0\) est par exemple l’intervalle \(]-1, 1[\), ou encore \([-2, 3]\), car ce dernier contient l’ouvert \(]-1, 1[\) qui contient \(0\). En revanche, \(\{0\}\) seul n’est pas un voisinage de \(0\) (il ne contient aucun intervalle ouvert non vide centré en \(0\)).
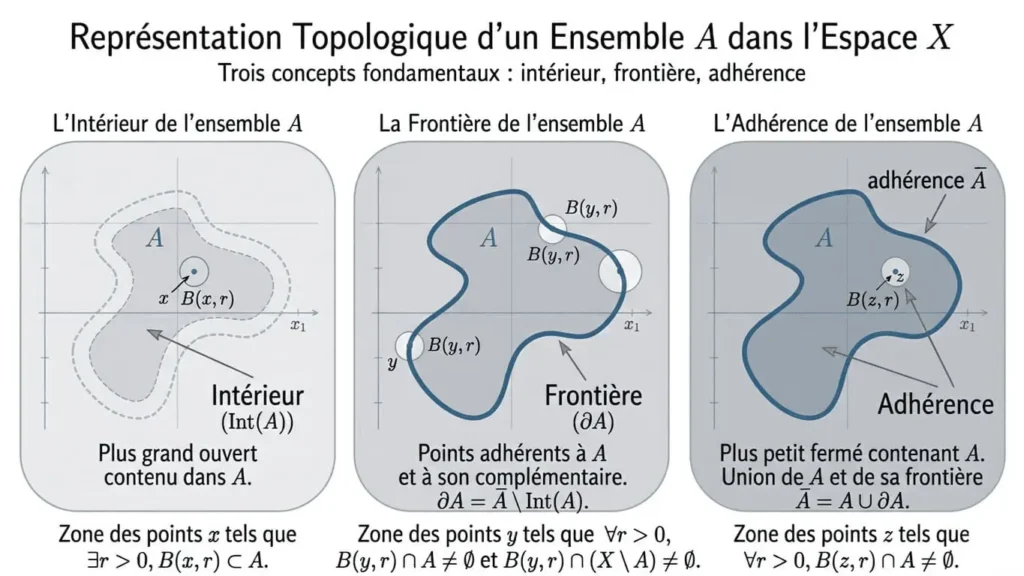
Intérieur, adhérence et frontière
Soit \(A \subseteq X\).
- L’intérieur de \(A\), noté \(\mathring{A}\) ou \(\mathrm{Int}(A)\), est le plus grand ouvert contenu dans \(A\).
- L’adhérence (ou fermeture) de \(A\), notée \(\overline{A}\), est le plus petit fermé contenant \(A\).
- La frontière de \(A\) est \(\partial A = \overline{A} \setminus \mathring{A}\).
Exemple dans ℝ
Prenons \(A = [0, 1[\) dans \(\mathbb{R}\) muni de la topologie usuelle :
- \(\mathring{A} = ]0, 1[\) (le plus grand ouvert contenu dans \(A\)).
- \(\overline{A} = [0, 1]\) (le plus petit fermé contenant \(A\)).
- \(\partial A = \{0, 1\}\).
Topologie des espaces métriques
Un cas particulièrement important est celui où la topologie provient d’une distance. Un espace métrique est un couple \((X, d)\) où \(d : X \times X \to \mathbb{R}_+\) est une application vérifiant : séparation, symétrie et inégalité triangulaire. À tout espace métrique on associe une topologie naturelle.
Définition : Boule ouverte et topologie métrique
Soit \((X, d)\) un espace métrique. La boule ouverte de centre \(x\) et de rayon \(r > 0\) est :
La topologie associée à \(d\) est la topologie dont les ouverts sont exactement les parties \(U \subseteq X\) telles que pour tout \(x \in U\), il existe \(r > 0\) avec \(B(x, r) \subseteq U\).
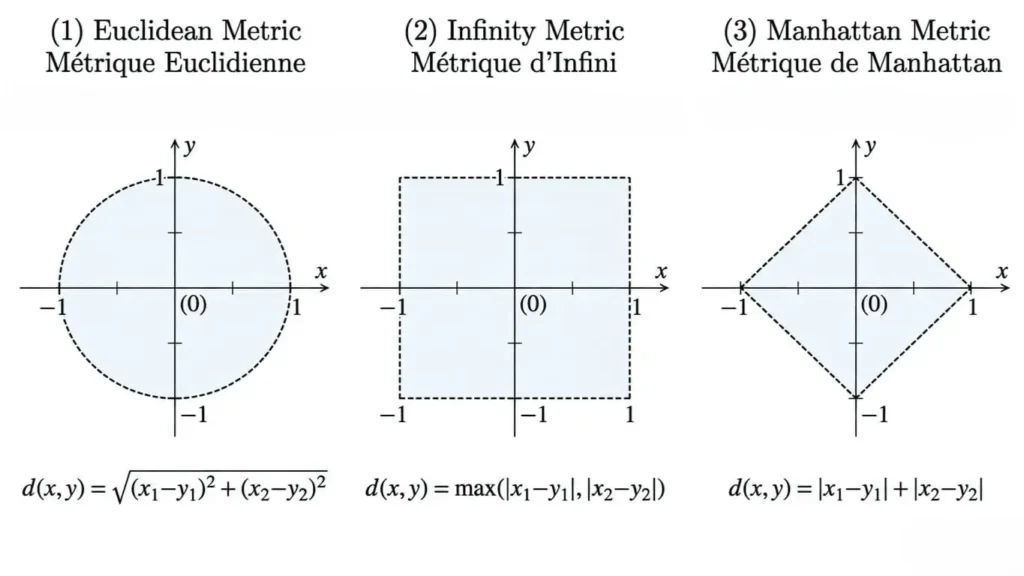
Deux distances sur un même ensemble peuvent définir la même topologie : on les dit alors topologiquement équivalentes. Par exemple, sur \(\mathbb{R}^n\), les distances euclidienne \(d_2\), \(d_1\) et \(d_\infty\) définissent toutes la même topologie (la topologie usuelle de \(\mathbb{R}^n\)).
Continuité en topologie
La notion de continuité prend en topologie une formulation élégante et très générale, qui coïncide avec la définition epsilon-delta classique dans les espaces métriques.
Définition : Application continue
Soient \((X, \mathcal{T}_X)\) et \((Y, \mathcal{T}_Y)\) deux espaces topologiques. Une application \(f : X \to Y\) est dite continue si l’image réciproque de tout ouvert de \(Y\) est un ouvert de \(X\) :
Cette définition révèle l’essence de la continuité : une fonction continue est celle qui « respecte » la structure topologique, en ce sens que les ouverts de l’espace d’arrivée se « relèvent » en ouverts dans l’espace de départ.
Définition : Homéomorphisme
Un homéomorphisme entre deux espaces topologiques \(X\) et \(Y\) est une bijection \(f : X \to Y\) telle que \(f\) et \(f^{-1}\) soient toutes deux continues. Deux espaces homéomorphes partagent exactement les mêmes propriétés topologiques : on les considère comme « identiques » du point de vue de la topologie.
L’exemple classique : un cercle et un carré sont homéomorphes (on peut « déformer » l’un en l’autre sans couper ni coller). En revanche, un cercle et une droite réelle ne le sont pas.
Notion de Compact en topologie
La compacité est l’une des notions les plus puissantes de toute la topologie. Elle généralise, dans un cadre abstrait, l’idée intuitive qu’un ensemble est « borné et fermé » dans \(\mathbb{R}^n\).
Définition : Espace compact (par recouvrements ouverts)
Un espace topologique \((X, \mathcal{T})\) est dit compact si de tout recouvrement ouvert de \(X\) on peut extraire un sous-recouvrement fini. Autrement dit, si \((U_i)_{i \in I}\) est une famille d’ouverts telle que \(X = \bigcup_{i \in I} U_i\), alors il existe \(i_1, \ldots, i_n \in I\) tels que \(X = U_{i_1} \cup \cdots \cup U_{i_n}\).
Pourquoi cette définition semble-t-elle bizarre ?
Au premier abord, parler de recouvrements ouverts peut paraître artificiel. Voici une intuition : si votre espace est « infini sans bord » (comme \(\mathbb{R}\) entier), vous pouvez le recouvrir par les intervalles \(]n-1, n+1[\) pour \(n \in \mathbb{Z}\), et ce recouvrement n’admet aucun sous-recouvrement fini. En revanche, sur un segment fermé borné comme \([0,1]\), tout recouvrement ouvert admet toujours un sous-recouvrement fini — c’est précisément ce que garantit le théorème de Heine-Borel-Lebesgue.
Théorème : Heine-Borel-Lebesgue (dans \(\mathbb{R}^n\))
Une partie \(K \subseteq \mathbb{R}^n\) muni de la topologie usuelle est compacte si et seulement si elle est fermée et bornée.
Propriétés essentielles des compacts
- Tout compact est fermé dans un espace de Hausdorff.
- Tout fermé inclus dans un compact est compact.
- L’image continue d’un compact est compacte.
- Toute suite dans un espace métrique compact admet une sous-suite convergente (compacité séquentielle).
Ce dernier point est fondamental en analyse : il garantit l’existence de valeurs d’adhérence et est à la base des théorèmes d’existence (valeurs extrêmes, point fixe de Brouwer, etc.).
Espaces connexes : Définition et exemples
Définition : Espace connexe
Un espace topologique \((X, \mathcal{T})\) est dit connexe si les seules parties de \(X\) qui soient à la fois ouvertes et fermées sont \(\emptyset\) et \(X\).
Intuitivement, un espace connexe est un espace « d’un seul tenant » : on ne peut pas le « couper » en deux morceaux ouverts disjoints non vides. La droite réelle \(\mathbb{R}\) est connexe ; en revanche \(\mathbb{R} \setminus \{0\} = ]-\infty, 0[ \cup ]0, +\infty[\) ne l’est pas.
Définition : Connexité par arcs
Un espace \(X\) est dit connexe par arcs si, pour tout couple de points \(x, y \in X\), il existe un chemin continu \(\gamma : [0,1] \to X\) tel que \(\gamma(0) = x\) et \(\gamma(1) = y\).
Tout espace connexe par arcs est connexe, mais la réciproque est fausse en général. Un contre-exemple classique est le « sinus du topologiste » : la courbe \(\{(x, \sin(1/x)) \mid x > 0\} \cup \{0\} \times [-1,1]\) dans \(\mathbb{R}^2\) est connexe mais non connexe par arcs.
Propriété : Image continue d’un connexe
L’image d’un espace connexe par une application continue est connexe.
Ce résultat contient comme cas particulier le théorème des valeurs intermédiaires : une fonction continue sur un intervalle (qui est connexe) prend toutes les valeurs intermédiaires.
Preuve détaillée : les propriétés des ouverts et des fermés
Démonstration : toute réunion d’ouverts est un ouvert
Soit \((U_i)_{i \in I}\) une famille d’ouverts, et posons \(U = \bigcup_{i \in I} U_i\). Montrons que \(U\) est ouvert.
Soit \(x \in U\). Par définition de la réunion, il existe \(i_0 \in I\) tel que \(x \in U_{i_0}\). Comme \(U_{i_0}\) est ouvert, il est voisinage de \(x\), donc il existe un ouvert \(V\) tel que \(x \in V \subseteq U_{i_0} \subseteq U\). Ainsi \(U\) est voisinage de chacun de ses points, donc \(U\) est ouvert.
Démonstration : l’intersection finie d’ouverts est un ouvert
Soient \(U_1, \ldots, U_n\) des ouverts. Posons \(U = U_1 \cap \cdots \cap U_n\). Soit \(x \in U\) : pour chaque \(k \in \{1, \ldots, n\}\), \(x \in U_k\) donc il existe \(r_k > 0\) tel que \(B(x, r_k) \subseteq U_k\) (dans le cadre métrique). On pose \(r = \min(r_1, \ldots, r_n) > 0\) (minimum fini de réels strictement positifs, donc strictement positif). Alors :
donc \(B(x,r) \subseteq U\). Ainsi \(U\) est un ouvert.
Pourquoi l’intersection infinie peut-elle échouer ? Prenons dans \(\mathbb{R}\) les ouverts \(U_n = ]-1/n, 1/n[\) pour \(n \geq 1\). Leur intersection infinie est \(\{0\}\), qui est fermé (non ouvert) dans \(\mathbb{R}\). La finitude dans l’axiome est donc essentielle.
Tableau récapitulatif des notions essentielles
| Notion | Définition courte | Exemple dans ℝ |
|---|---|---|
| Ouvert | Voisinage de chacun de ses points | \(]0, 1[\) |
| Fermé | Complémentaire d’un ouvert | \([0, 1]\) |
| Voisinage de \(x\) | Contient un ouvert autour de \(x\) | \([-1, 1]\) est un voisinage de \(0\) |
| Compact | Tout recouvrement ouvert admet un sous-recouvrement fini | \([0, 1]\) (fermé borné) |
| Connexe | Seuls \(\emptyset\) et \(X\) sont ouverts-fermés | Tout intervalle de \(\mathbb{R}\) |
| Homéomorphisme | Bijection bicontinue | Cercle \(\simeq\) carré |
Conclusion
La topologie est bien plus qu’un simple cadre abstrait : c’est le langage dans lequel s’exprime la continuité, la limite, et la forme des objets mathématiques. En partant de la simple idée d’appeler certaines parties « ouvertes », on bâtit un édifice cohérent qui englobe l’analyse réelle, la géométrie différentielle et bien d’autres domaines. Les notions d’ouverts et de fermés, de compacité et de connexité constituent les piliers sur lesquels reposent les grands théorèmes d’existence et de régularité que vous rencontrerez tout au long de vos études.
Questions fréquentes sur la topologie
Quelle est la différence entre un espace métrique et un espace topologique ?
Un espace métrique est un ensemble muni d’une distance (une fonction qui mesure l’écart entre deux points). Tout espace métrique définit naturellement un espace topologique, via les boules ouvertes. En revanche, un espace topologique est plus général : on y spécifie directement quelles parties sont « ouvertes », sans nécessairement passer par une distance. Ainsi, tout espace métrique est un espace topologique, mais la réciproque est fausse (il existe des espaces topologiques qui ne proviennent d’aucune distance).
À quoi sert la topologie en dehors des mathématiques pures ?
La topologie a des applications dans de nombreux domaines. En physique, elle intervient dans l’étude des phases de la matière et de l’espace-temps. En informatique théorique, les espaces topologiques servent à modéliser la sémantique des langages de programmation. En biologie computationnelle, la topologie persistante (topological data analysis) permet d’analyser la forme des nuages de données. En robotique, la topologie des espaces de configuration détermine les chemins possibles d’un robot.
Comment démontrer qu’une partie est compacte ?
Dans \(\mathbb{R}^n\), on utilise le théorème de Heine-Borel-Lebesgue : une partie est compacte si et seulement si elle est fermée et bornée. Dans un espace métrique général, on peut montrer la compacité séquentielle (toute suite admet une sous-suite convergente dans l’ensemble) ou directement utiliser la définition par recouvrements ouverts. Pour montrer qu’une partie n’est pas compacte, il suffit d’exhiber un recouvrement ouvert sans sous-recouvrement fini, ou une suite sans valeur d’adhérence dans l’ensemble.
Quelle est la différence entre connexité et connexité par arcs ?
Un espace est connexe par arcs si deux points quelconques peuvent être joints par un chemin continu à l’intérieur de l’espace. Un espace connexe, lui, est simplement un espace qui ne peut pas être décomposé en deux ouverts disjoints non vides. Tout espace connexe par arcs est connexe, mais la réciproque est fausse : le « sinus du topologiste » est l’exemple classique d’un espace connexe qui n’est pas connexe par arcs.
Qu’est-ce qu’un homéomorphisme en topologie ?
Un homéomorphisme est une bijection continue dont l’inverse est également continue, entre deux espaces topologiques. Deux espaces homéomorphes sont « identiques » du point de vue topologique : ils partagent toutes leurs propriétés topologiques (compacité, connexité, nombre de composantes connexes…). L’exemple populaire : une tasse à café et un tore (beignet) sont homéomorphes, car on peut déformer l’un en l’autre continûment sans couper ni coller.